1.1 机器人的概念¶
机器人的基本结构¶
机器人的基本结构:
- 执行机构:对应人的躯干和四肢
- 驱动-传动系统:对应人的肌肉、肌腱
- 控制系统:对应人的大脑
- 感知反馈系统:对应人的感觉器官、神经等
机器人的子系统¶
机器人系统通常包括3个子系统,分别是:
- 运动子系统:Motion subsystem
- 辨识子系统:recognition subsystem
- 控制子系统:control subsystem
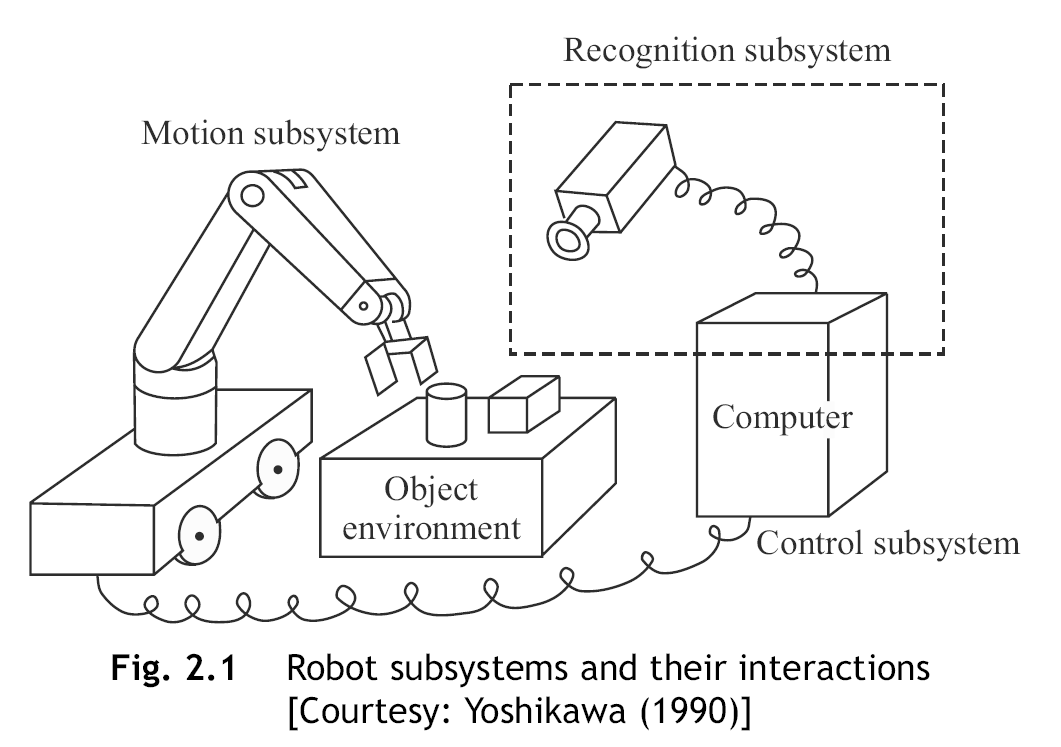
运动子系统:用于实现期望运动的执行机构
辨识子系统:使用一系列传感器来获取机器人本身、操作对象和环境的信息
控制子系统:根据辨识子系统的信息来控制机器人的运动,以完成既定动作任务
1.运动子系统¶
包含:操作臂、末端执行器、驱动器 以及 传动装置 这四个部件。
操作臂 Manipulator:
操作臂是机器人可运动的机械结构,通常又连杆(身体)和运动副(关节)串联而成。
关节的运动形式又旋转和平移,分别成为旋转关节和平移关节。
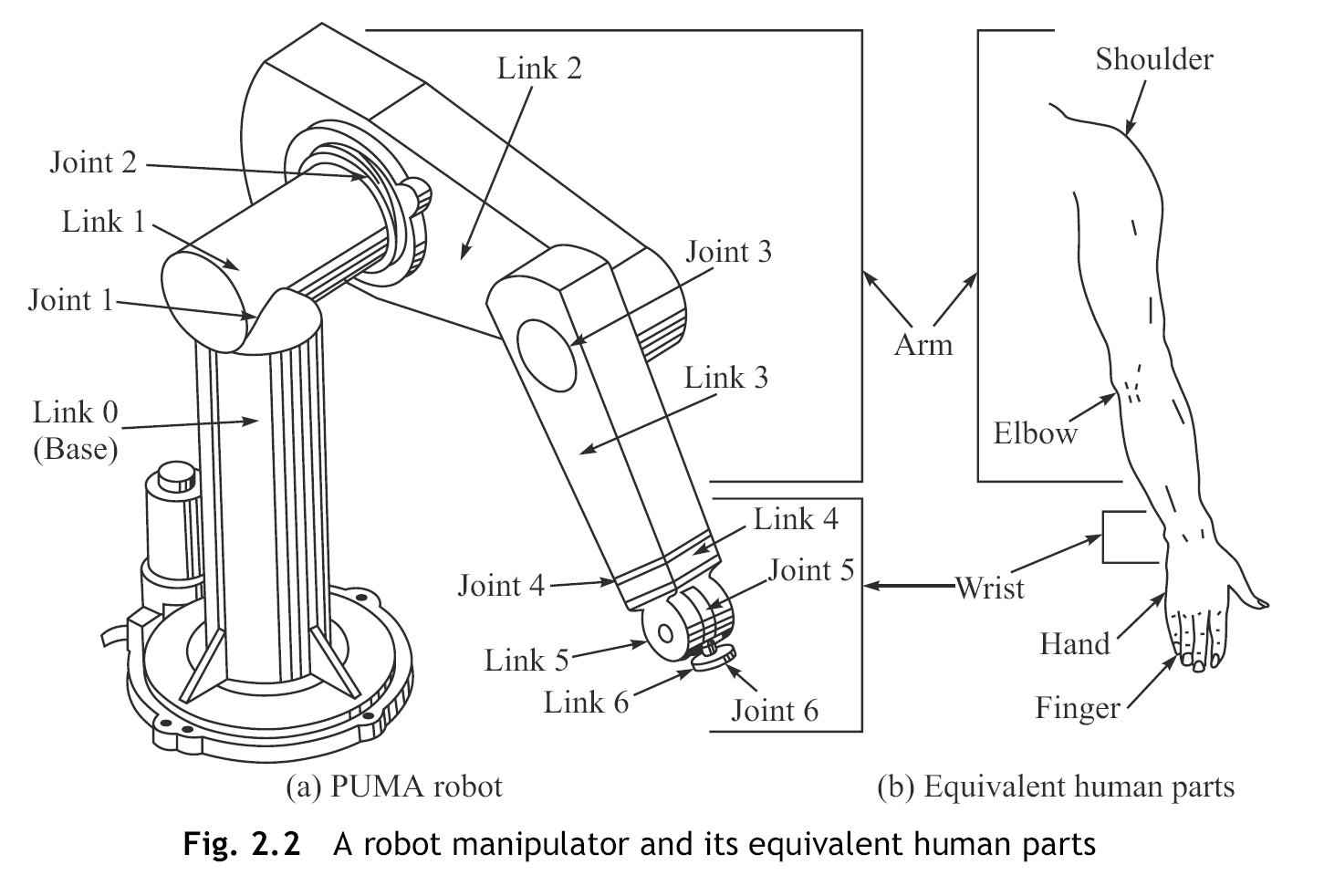
机器人操作臂
末端执行器 End-effector:
末端执行器,顾名思义,就是固定在操作臂末端的装置,相当于人类的手。
末端执行器通常是一个机械夹手,用来操作或者移动工件。
驱动器 Actuator:
驱动器用来驱动操作臂和末端执行器运动,根据其驱动原理,又分为:
- 气动驱动器 Pneumatic Actuator
- 液压驱动器 Hydraulic Actuator
- 电动驱动器 Electric Actuator
一个驱动器的基本结构如下:
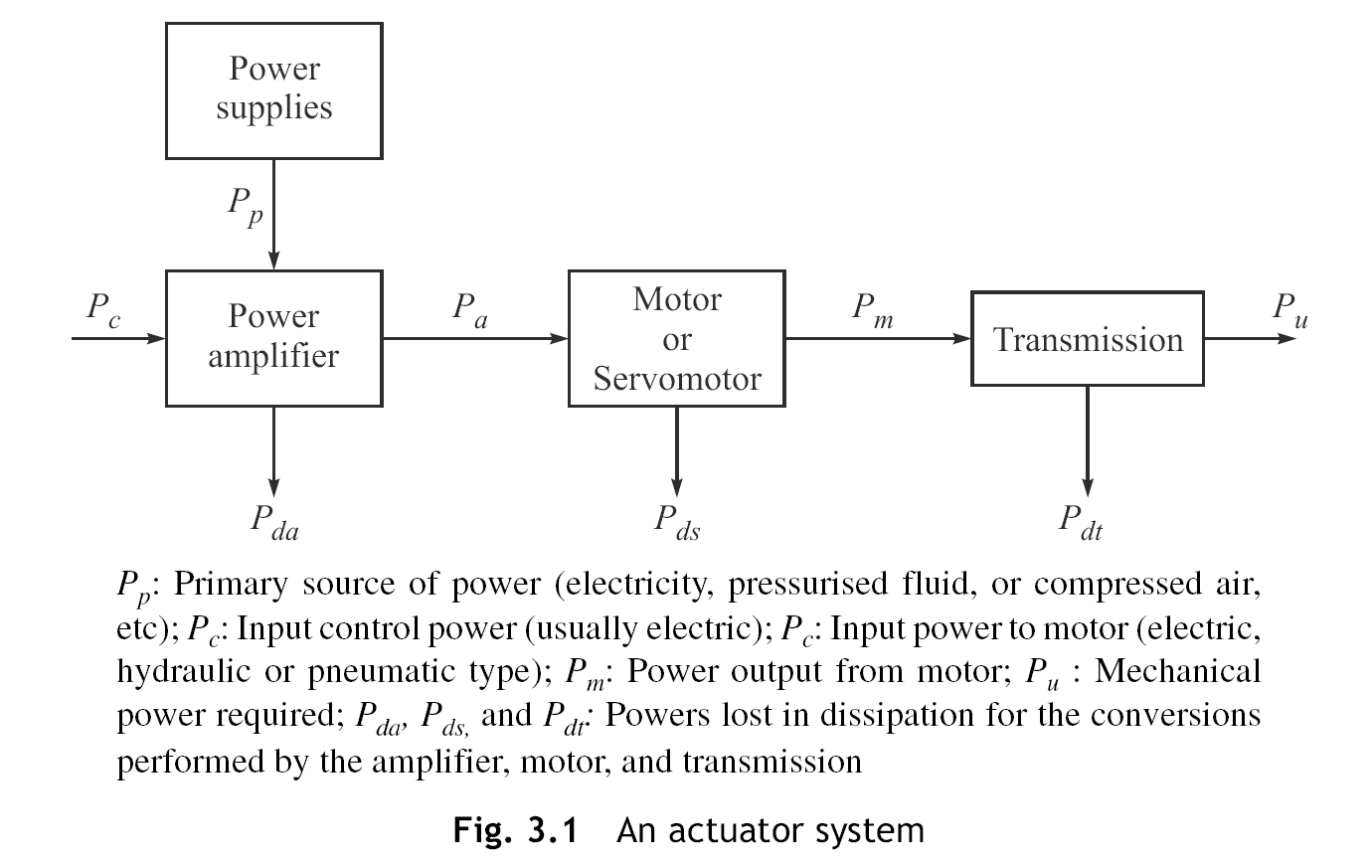
驱动器系统结构
传动装置 Transmission:
典型的传动单元有:
- 带传动
- 链传动
- 齿轮传动
- 连杆传动
2.辨识子系统¶
辨识子系统通常由 传感器 和 模数转换器 组成。
传感器 Sensor:略
模数转换器 Analog-to-Digital-Converter:略
3.控制子系统¶
控制子系统结构及其工作流程大致如下图所示:
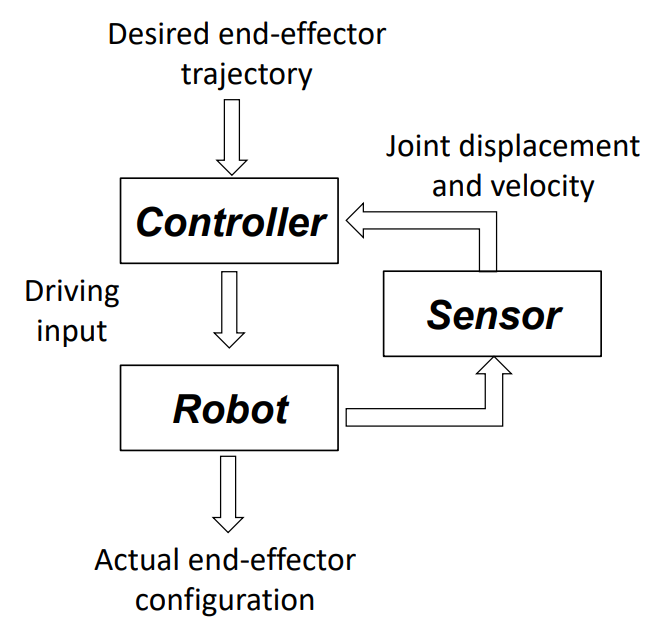
控制子系统的结构
控制子系统一般由: 数字控制器 Controller、数模转换器 Digital-to-Analog-Converter、放大器 Amplifier 组成。